CLOSE
About Elements
田中贵金属是贵金属领域的翘楚企业。
支撑社会发展的先进素材和解决方案、
创造了这些的开发故事、技术人员们的心声、以及经营理念和愿景——
Elements是以“探求贵金属的极致”为标语,
为促进实现更加美好的社会和富饶的地球未来传播洞察的网络媒体。







These micro-robots were inspired by mini-bugs and water striders
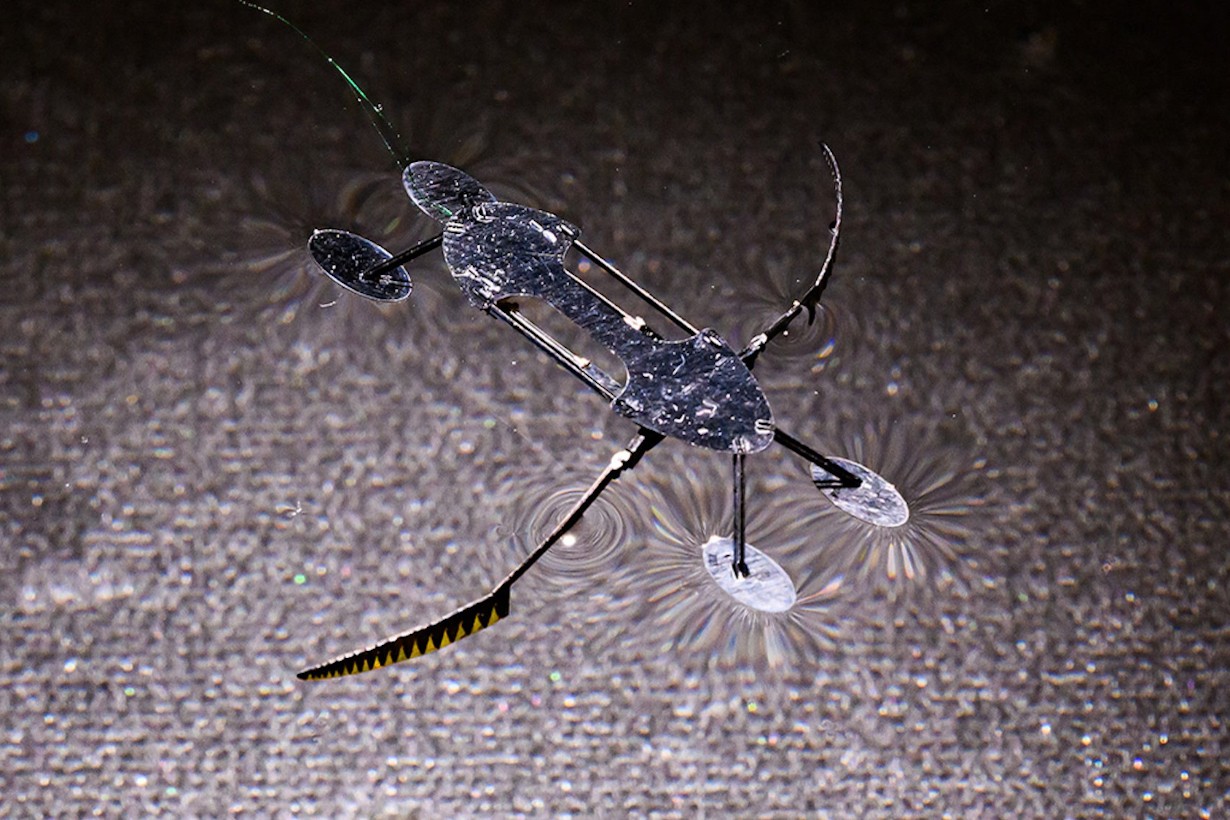
The design theory behind a pair of tiny insect-inspired obots may one day find its way into environmental monitoring, surgery procedures, as well as search-and-rescue missions—all while, reportedly, setting records in the process. Modeled after a mini-bug and a water strider, the two bots respectively weigh in at eight and 55 milligrams, and may mark the “smallest, lightest, and fastest fully functional” micro-robots in the world, according to Washington State University.
Developed by a team of WSU researchers and recently presented at the IEEE Robotics and Automation Society’s International Conference on Intelligent Robots and Systems, the robots’ teenyness is largely owed to their novel movement actuators weighing less than a milligram each. To construct the parts, a group led by associate professor of engineering Néstor O. Pérez-Arancibia relied on a material known as a shape memory alloy. Although shape memory alloys change form when heated, they can “remember” their original shapes and return to them after cooling. Because of this, the two micro-bots do not require standard motors, and therefore have no need for bulky moving parts.
Both the mini-bug and water strider robots’ actuators are each composed of two shape memory alloy, 1/1000th inch-wide wires. Small electrical currents heat and cool the wires, allowing the actuators to move their fins or limbs as fast as 40 times a second while also lifting over 150 times their weight.
“They’re very mechanically sound. The development of the very lightweight actuator opens up new realms in micro-robotics,” Conor Trygstad, a mechanical and materials engineering PhD student and study lead author, explained in WSU’s recent spotlight.
But although the robots are impressive when compared to their mechanical peers, the pair “still [lag] behind their biological relatives,” conceded Trygstad.
Credit: BOB HUBNER, WSU PHOTO SERVICES
Both machines can currently traverse their environments at about six millimeters a second; a five-milligram ant, by comparison, speeds along at about a meter per second. Part of this limitation is owed to the micro-robots’ designs—the water strider bot can flap its limbs to propel itself atop water, but its natural inspiration actually uses its legs to row to move much faster. For now, the robots also require wired power sources, thus severely preventing any real-world implementations for the moment.
Going forward, however, the team intends to mimic other bug species while also creating a new water strider iteration capable of switching between moving atop water, and underneath its surface. Relying on catalytic combustion or integrating small batteries could also vastly increase the robots’ utility and range of use. If the breakthrough designs continue improving, similar micro-robots could one day be deployed to monitor hard-to-reach or dangerous environments, help with miniature fabrication techniques and surgical procedures, and even aid artificial pollination efforts.
This article was written by Andrew Paul from Popular Science and was legally licensed through the DiveMarketplace by Industry Dive. Please direct all licensing questions to legal@industrydive.com.